ifm3d Overview
Library and utilities for working with ifm pmd-based 3D ToF Perception devices. Compatible with the O3R, O3D and O3X platforms.
This library is available in Python, C++, and has wrappers for ROS and ROS2.
C++ API Reference
Python API Reference
Comprehensive documentation is available on ifm3d.com.
![]()
![]()
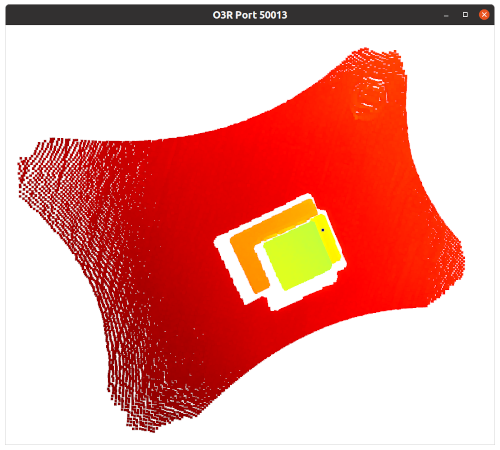
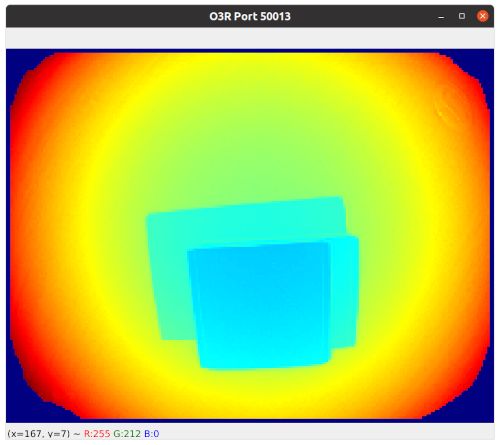
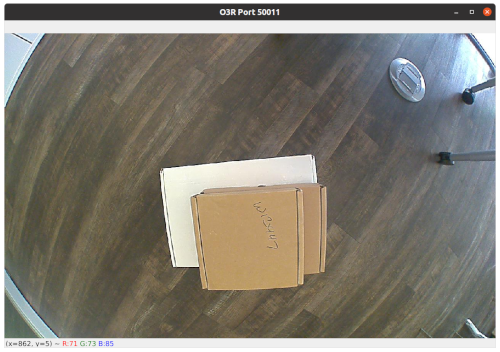
3D cloud |
Distance |
RGB |
|---|---|---|
|
|
|
Released Versions
⚠️ Note that the main branch is generally in a work in progress state and you probably want to use a
tagged release version for production.
⚠️ Note that O3D and O3X support is currently experimental- Use at your own risk!.
For a full compatibility matrix between the ifm3d library, the O3R firmware and the Vision Assistant GUI, please refer to the compatibility matrix on ifm3d.com.
Supported languages
ifm3d is a C++ based library, with a Python wrapper mirroring the available features. We support the following versions of these two languages:
Name |
Versions |
|---|---|
Python |
3.9, 3.10, 3.11, 3.12, 3.13 |
C++ |
GCC 7.5+, MSVC 2019+ |
Supported operating systems
ifm3d currently support the following OS:
Name |
Versions |
Comment |
|---|---|---|
Ubuntu |
20.04, 22.04, 24.04 |
|
Windows |
Windows server 2019 |
ifm3d is known to work for other Windows distributions but is not explicitly tested. |
Organization of the Software
The ifm3d software is organized into modules, they are:
Module name |
Description |
|---|---|
|
Provides an implementation of the XMLRPC protocol for configuring the camera and pmd imager settings. |
|
Provides an implementation of the PCIC protocol for streaming pixel data and triggered image acquisition. |
|
Provides utilities for managing the |
|
Direct access to PCIC to, for example, actuate digital IO. |
|
Provides the ifm3d command line tool for manipulating and introspecting the hardware interactively. It is also suitable for usage within shell scripts to, for example, manage fleets of cameras. |
|
Provides Python bindings through pybind11 to the native C++ API. Supports all general camera functionality as well as a zero-copy interface to image data, exposed as NumPy arrays. |
|
Provides definitions and functions for deserializing structs sent over PCIC. |
Installation instructions
Please refer to the corresponding section on ifm3d.com.
Supported docker containers
Docker containers are available for the ifm3d library, both on GHCR and on the dockerhub. You can pull them with:
docker pull ghcr.io/ifm/ifm3d:stable
OR
docker pull ifmrobotics/ifm3d:stable
Note that we provide 2 tags, stable always points to the latest tagged version, and latest is built nightly with the latest changes on the main branch. The latest tag is typically a work in progress.
For more details on the available containers, see here.
For more details on docker and the O3R platform see here.
Examples
Examples for the ifm3d library can be found in the ifm3d-examples repository.
Report a bug and check the known issues
Please see the GitHub Issue Tracker, or contact support.robotics@ifm.com.
LICENSE
Please see the LICENSE file.